目的
本講義で使用するロシミュレータstageをインストールします.なお,既に他の講義にてROSをインストールしていることを前提としていますので,インストールしていない場合にはこちらのページを参考にインストールしてください.
ロボットシミュレータ stage
ロボット理工学演習Aでは,ロボットシミュレータとしてturtlesimを使用しています.本シミュレータはシンプルであるため,ROSの勉強には最適ですが,センサーが搭載されていないため,センシングを伴うロボットの制御には利用できません.そこで,本講義ではセンサが搭載されたstageを利用します.stageは,ROSのros-noetic-desktop-fullに含まれています.
下記によりstageを起動してください.
$ rosrun stage_ros stageros $(rospack find stage_ros)/world/willow-erratic.world
上記を実行すると,下記のようなウィンドウが起動します.

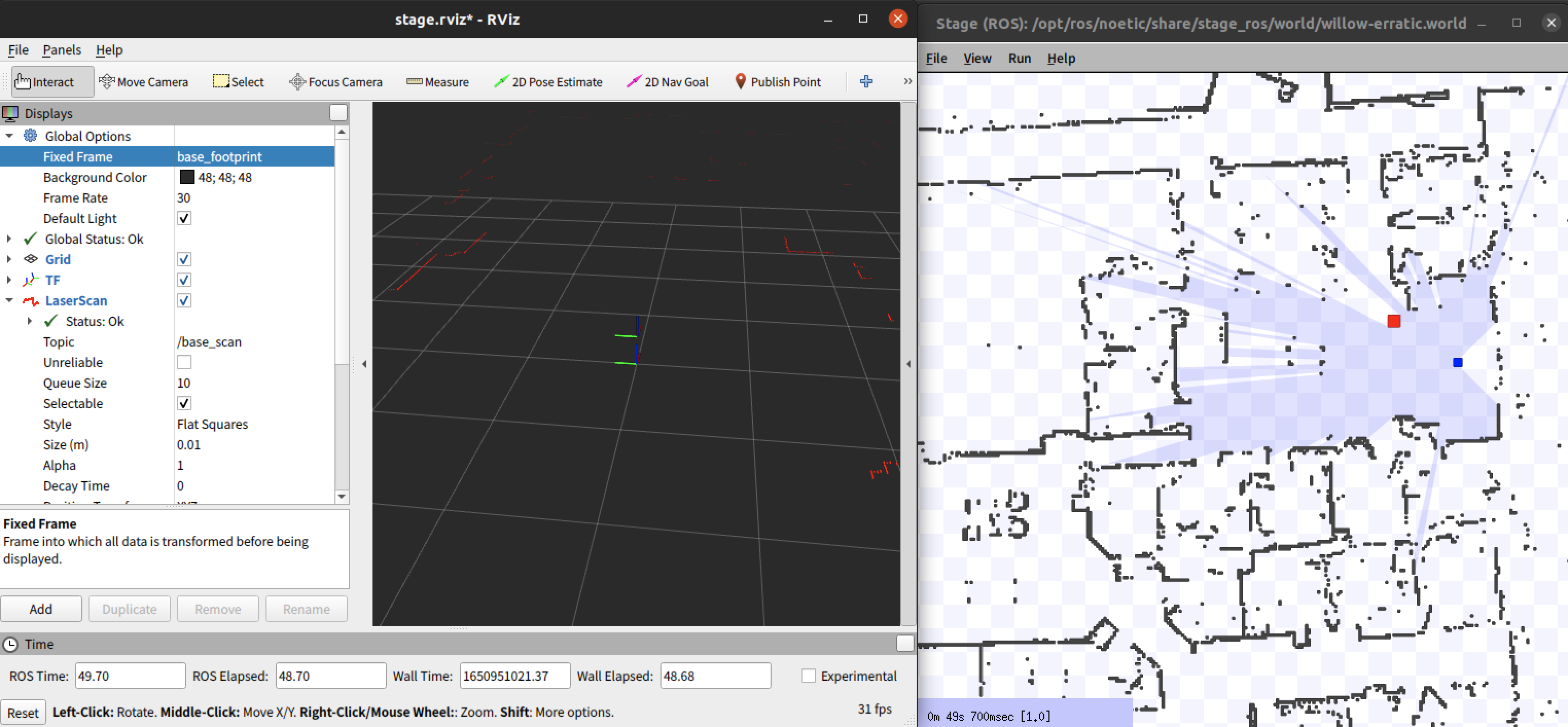
青色と赤色の四角が表示されていますが,青色の四角形はロボット,赤色の四角形は障害物です.これらは選択してからドラッグすることで,移動することができます.
可視化ツールであるrvizにより,ロボットやセンサ情報を可視化しましょう.stageの情報を読み込みながらrvizを起動する際には,下記のコマンドを実行します.
$ rosrun rviz rviz -d `rospack find stage_ros`/rviz/stage.rviz
試しに,下記の画像のようにレーザーを表示してみましょう.
講義で使用するパッケージのインストール
本講義で使用するパッケージを追加インストールします.下記を実行してインストールしてください.
$ sudo apt update $ sudo apt install ros-noetic-teleop-twist-keyboard ros-noetic-gmapping ros-noetic-map-server ros-noetic-amcl ros-noetic-move-base