目的
ここまでの講義にて,ROSを用いた通信方法やソフトウェア開発手順を学びました.さらに,turtlebot2を用いた台車移動の制御や,バンパー・kinectによるセンシングに取り組み,自律移動ロボットの制御方法について学びました.今回は,これまでに学んだ知識や経験を生かし,身の回りにあるロボットの動きを実現する課題に取り組みます.
課題
課題のテーマは,お掃除ロボットによる部屋の清掃です.
課題概要
turtlebotをお掃除ロボットと見立て,ロボティクスラボAの生活空間にて障害物を避けながら部屋を網羅的に移動し,制限時間内にゴールエリアを目指します.通過したカーペットの枚数と障害物回避の可否,ドッキングステーションにドッキングできたかを点数化します.

ルール
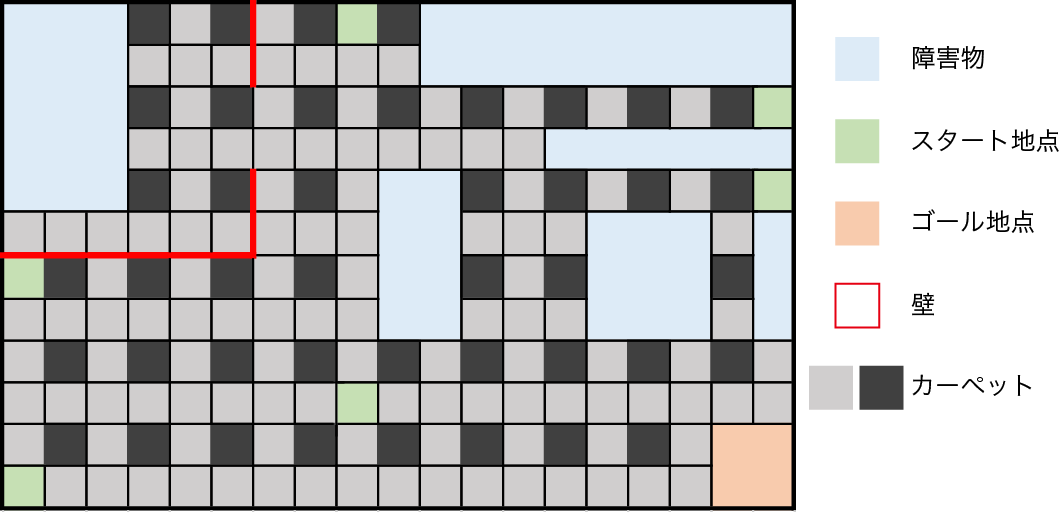
課題は6箇所のスタート地点からランダムに選ばれた場所からスタートします.バンパー及びkinectを用いて障害物を考慮しながらロボットを移動させ,制限時間内にゴール地点に移動します.制限時間は180秒です.下の図はロボティクスラボA生活空間のイメージです.画像中の障害物は適宜移動します.なお,ゴール地点にはドッキングステーションが配置されているため,ドッキングステーションから照射されている赤外線を検知し,ゴール地点を推定することが可能です.
参考 : Automatic Docking
得点
得点は,基本点とボーナス点の合計です.ボーナス点はゴールした場合にのみ獲得できます.
- 基本点
- 50 x 50cmのカーペットを通過 : 10点
- カーペットにロボットが半分以上侵入すること
- 同一のカーペットを複数回にわたって通過しても加点は10点のみ
- 50 x 50cmのカーペットを通過 : 10点
- ボーナス点
- ドッキングステーションに到達し,充電を開始した : 150点
- 障害物への接触を回避した : 100点
- 障害物に接触したが,接触を検知して方向転換した : 30点
禁止行為
下記の行為は禁止します.
- 人手によるturtlebotの操作
- 事前に作成した地図の利用
- 競技中に地図を作成することは問題ありません
- 所望のスタート地点からの開始
- linear.xは0.3以下