目的
ここまでに学んだ技術を駆使して,グループ単位で難しい課題にトライします.課題を分析し,皆で戦略を立て,協力しながら発表会までに課題をクリアしましょう.
最終課題
テーマ:賢いお掃除ロボットで部屋を綺麗に
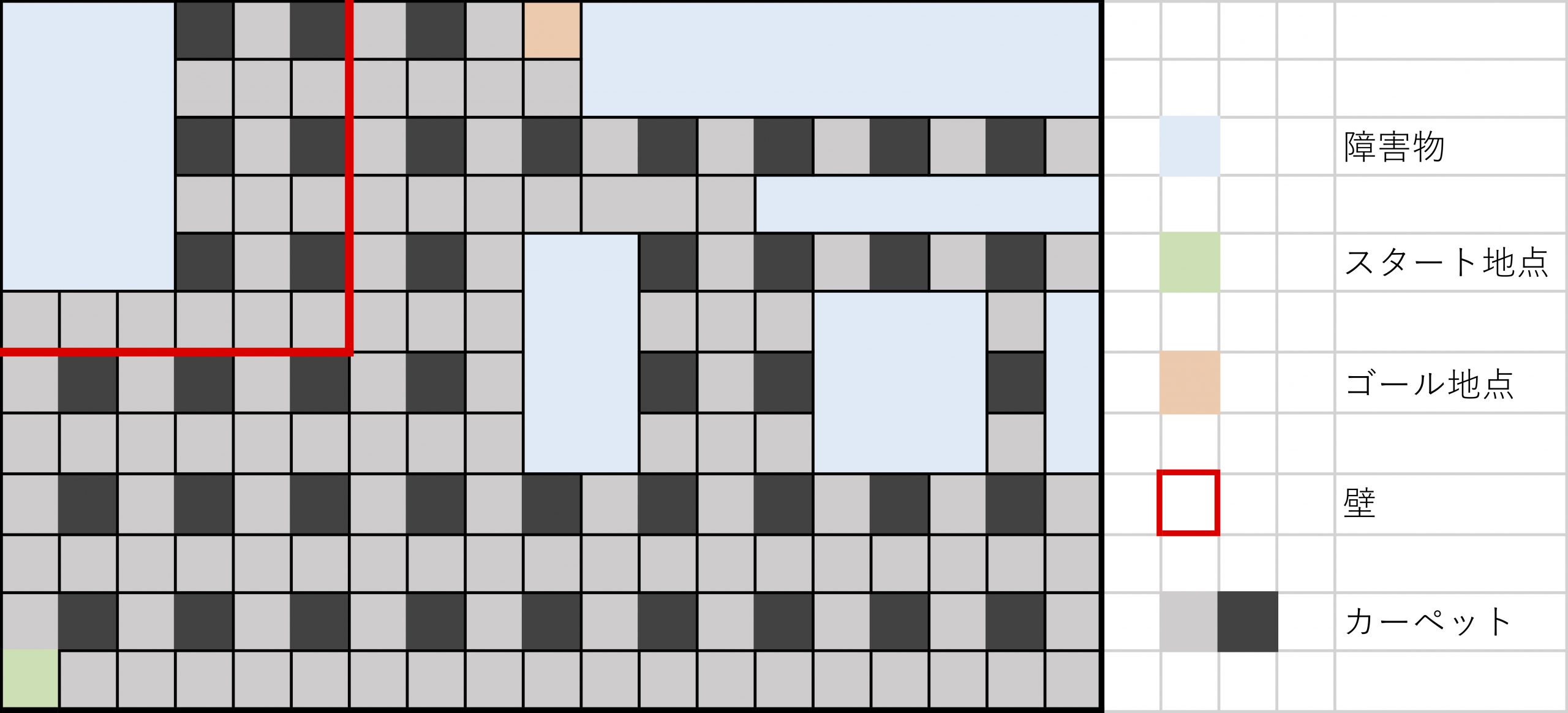
Turtlebot2をお掃除ロボットと見立てて実験室を綺麗にします.制限時間内にTurtlebot2をスタート地点からゴール地点まで走らせます.その際,通過するカーペットの枚数が多いほど,多くの得点を稼ぐことができます.また,技術的に工夫した内容はボーナス点として加点されます.

ルール
- 制限時間は180秒
- スタート地点は固定(下記の見取り図の通り)
- ゴールエリアに侵入した時点で時間の計測は終了
- ゴールエリアに侵入しなかった場合には,基本点は半分となる
- ゴールエリア侵入後にドッキングを試すことが可能
- 充電できた場合のみ,ドッキング成功とみなす
- 障害物の位置や数は変わることがある

基本点
- 50×50[cm]のカーペットを通過する度に5点
- 同じカーペットを通過しても加点は1度のみ
- カーペットにロボットが半分以上侵入した場合のみ加点
- ゴールしなかった場合には,基本点は半分となる
ボーナス課題
技術的な工夫をした場合には,ボーナス点として1項目につき最大100点を加点します.加点する得点は,成果発表会にて判定します.技術項目は下記の5項目です.
- センシングによる障害物回避
Kinectもしくはバンパーを使って障害物を検知し,避けながらゴールに到達することでボーナス点が得られます.Kinectを用いて接触することなく走行ゴールエリアに到達すると高得点です.
- ホームステーションとのドッキング(充電)
Turtlebot2がホームステーションとドッキングできた場合にはボーナス点が加点されます.ドッキングが成功すると,ホームステーションのランプが赤から緑に変化します.成功した場合のみドッキング成功と判定します.
参考情報:Automatic Docking
- ノータッチでお掃除開始
キーボードやマウス以外から信号を送り,Turtlebot2を動かすと加点します.下記に信号を送る方法としては,例えばTurtlebotのボタン,音声認識や画像認識(写真やARタグ),携帯電話からの操作などが考えられます.
参考情報:
- 音声認識:rospeex,Julius
- 画像認識:ar_track_alvar,find_object_2d,
- 携帯電話との連携:rosbridge_suite
- センサを使ってゴールエリアの認識
センサを用いてゴールエリアを認識した場合(ゴールエリア侵入前)には加点します.ただし,認識した結果を何らかの方法(ディスプレイに表示,音声を鳴らす)で提示する必要があります.
- その他
上記以外で技術的に工夫した場合には加点します.斬新かつ便利だと思えるような機能には高い点数を加点します.
注意事項
- 人手による操縦は禁止
- ロボット及び障害物を破損させる行為は禁止
- Turtlebotの速度に条件を設ける(linear.xは0.4以下)